Design and development of a custom, 6-DOF Robotic Arm
Capabilities Demonstrated
- Design Requirements Development
- Rugged design for reliable operation within an outdoor environment
Human factors / user interface design
SWaP (Size, Weight and Power) analysis and design
Design for Manufacturability (DFM)
Manufacturing Process Development
Manufacturing Fixture Design
Design for Assembly (DFA)
Validation Testing
SOLIDWORKS CAD and FEA tools
- Manufacturing Design Package
- Tolerance Analysis
The Challenge
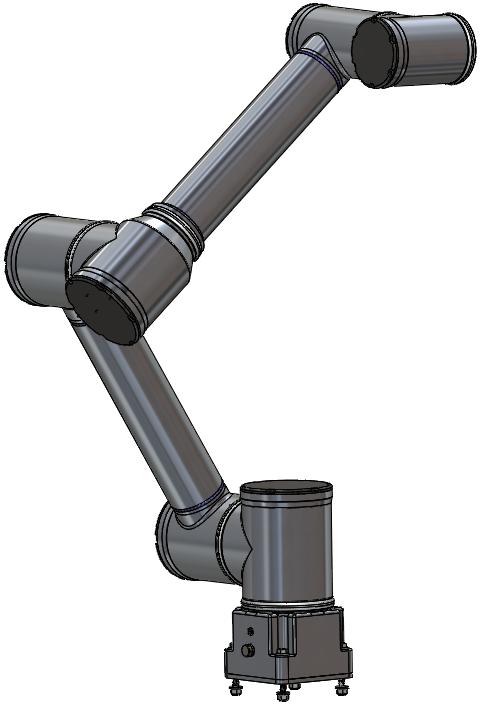
AppliedLogix was tasked with developing a full custom six degree of freedom (6-DOF) robotic arm for an outdoor agricultural application. The available commercial off the shelf (COTS) 6-DOF arms were carefully assessed and found to be unable to meet the environmental requirements nor the volume manufacturing pricing goals. The application dictated unique design requirements for the arm’s segment lengths and the orientation of the joints relative to one another. Additionally, the robotic arm was required to achieve an IP65 environmental rating over 10 million operational cycles. The harsh environment dictated that the materials and coatings selection needed to be inert for any exposed surfaces where wear was expected during normal operation. The robotic arm needed to operate on DC voltage and the servo actuators needed to operate at aggressive speeds and accelerations while moving a 3kg payload. In the event of a power loss or an emergency stop, position needed to be maintained and motion stopped within specified time to meet safety requirements. Additionally, the stopped unpowered robotic arm needed to support manual repositioning and then hold in place without damage.
Solution
Fully functional prototypes for this one of a kind robotic arm are now being evaluated against the project requirements. This case study highlights the broad spectrum of unique capabilities and design advancements that have been completed to date.
The AppliedLogix Engineering Team specified the requirements for strategic partners to develop custom actuators and seals for this project. Custom designed arm housings were developed for high volume manufacturing process and were easily prototyped during development at low volumes. To enable stringent IP ratings over the life of the product, unique processes and supporting tooling were developed by AppliedLogix Engineers to prepare the seal interfaces. Open source ROS based motion control was leveraged to animate the robot.
Seals
A custom joint sealing design solution was developed to meet the challenging environmental specs. The final design included a combination of tortuous paths, liquid tight sealing geometries, and pressure differentials to prevent and eliminate both particulate and water intrusion.
The seals are self-lubricating which drove the need for very fine surface finishes on the sealing surfaces of the arm joints. In addition, material and inert coating selections for the sealing surfaces needed to be durable and hard enough to prevent long term wear at the seal interface.
Existing manufacturing practices did not offer a solution for generating such a sealing surface. AppliedLogix designed and developed the custom tooling and supporting methods to post-process the seal interfacing surfaces of the robotic arm. Parts modified with the developed post treatment were verified to the requirements of the seal interface using qualified measurement systems. This process along with the seal and sealing surface geometries are being validated using life test fixtures designed and built by AppliedLogix.
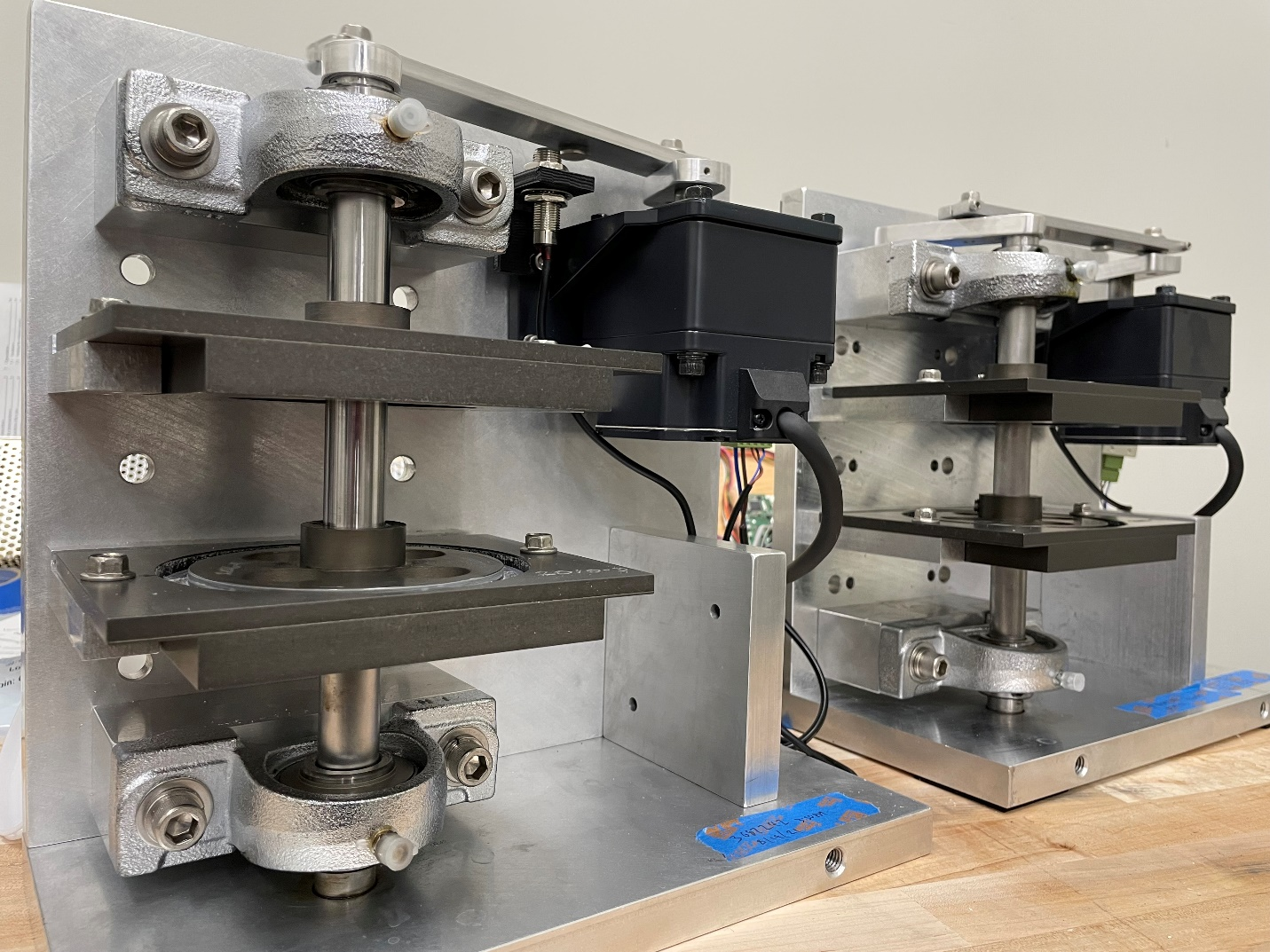
Figure 1: Seal Leak Test Fixtures @ 7,459,954 cycles
The need to specify and deploy a sealed arm created a parasitic loss of torque within the joint design. The seal loading needed to be carefully tuned to balance opposing goals – actuator torque loss and maximized seal life. Excessive frictional loading at the seal would result in an oversized actuator that would be incompatible with the application.
As the actuators and seal designs matured, the mechanical characteristics of the design were refined for weight and strength optimization. FEA models were created and evaluated to ensure physical strength was present only where it needed to be. The design was optimized for the casting process where uniform wall thicknesses are important to ensure consistent material flow without porosity during manufacturing.
Actuators – Servos
A custom actuator (motor drive / transmission) was needed to achieve the arm design performance goals. A global search and supplier selection was completed for an OEM Partner to develop and build the custom actuator. The actuator development effort began by first resolving the high-level project requirements and then building out the more detailed, component-specific requirements. Well defined component requirements led to an optimized design for mass, volume, and power.
Benefits
The key aspects and characteristics of this full custom / purpose-built 6-DOF robotic arm are unique within the industrial / commercial marketplace:
- Sealed IP65 enclosure and electrical connections
- 10 Year life under harsh conditions with a 10 million cycle durability target
- Integrated Motion Controller and safety functions
- 48 VDC Operating Voltage
- Arm configuration flexibility that includes joint orientation and section length
- Mass optimized design with exceptional strength to weight ratio
- Supported custom end-effector design
- Application specific mount provided durable mount in space constrained environment
- End of arm motion accuracy ?1°
System Summary
The 6 DOF custom robotic arm leveraged a machinable design that is intended for casting at higher volumes. Custom seals and arm geometry prevent intrusion of environmental contamination. Custom actuators ensure that needed speed, acceleration, torque, and accuracy is achieved. Initial field trials for the first complete prototype arm have been completed, After ~6 months of daily use, the achieved performance and reliability have met and exceeded all program goals.